
美国科学家研制的微型行走生物机器人,设计灵感来自于肌肉-腱-骨的复杂结构。这种生物机器人由实验室培育的肌肉细胞构成的肌肉条提供动力,由电脉冲进行控制,赋予研究人员空前的控制能力。研究人员表示这项研究成果将孕育出新一代柔软可弯曲生物机器人
在设计上,3D打印的水凝胶充当生物机器人的脊骨。这条脊骨拥有足够的坚固度,赋予生物机器人结构,同时又能像关节一样弯曲。两个锚柱负责将肌肉条固定在脊骨上,就像腱将肌肉依附在骨骼上一样。此外,锚柱还充当生物机器人的脚。它的速度可以通过调节电脉冲的频率进行控制
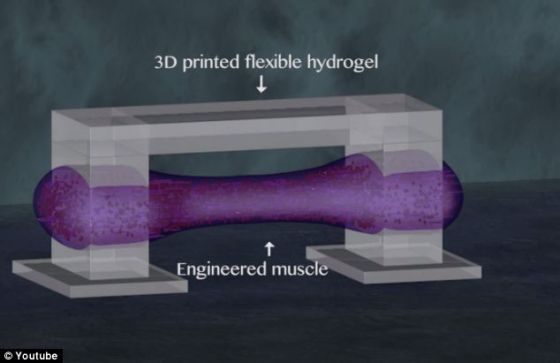
在设计上,3D打印的水凝胶充当生物机器人的脊骨。这条脊骨拥有足够的坚固度,赋予生物机器人结构,同时又能像关节一样弯曲。两个锚柱负责将肌肉条固定在脊骨上,就像腱将肌肉依附在骨骼上一样。此外,锚柱还充当生物机器人的脚。它的速度可以通过调节电脉冲的频率进行控制
项目组的研究生,这篇论文的合著者之一卡洛琳·凯特科维克(Caroline Cvetkovic)表示:“我们选择仿生设计作为起点是很自然地做法,就像是原生的肌肉骨骼系统。这项工作标志着我们朝着研制可以操控,训练甚至进行任务编程的生物机器人的方向迈出的重要的第一步。我们很高兴这一进展可能将会最终演化成为新一代的生物机器人,可以被广泛应用于药物分发,手术机器人,以及移动环境分析设备等等诸多领域。
下一步,研究人员们将继续开展工作,实现对生物机器人运动状态的更大程度操控,如为其植入神经系统,这样生物机器人便能运用光或化学信号实现各种控制。从工程的角度出发,设计者希望能够让生物机器人能够根据不同的信号做出不同的响应。感谢3D打印技术的发展,现在科学家们可以迅速尝试各种不同的形态与设计方案。巴沙尔与他的同事们甚至计划在本科生的课程中加入有关课程,以便让学生们也可以参与尝试设计不同的生物机器人。
项目组研究生,论文合著者里图·拉曼(Ritu Raman)表示:“生物设计已经不是什么新鲜的概念,组织工程学研究人员早已在这一领域耕耘多年,而这在医学领域将会具有重要意义。但我们为什么要在这里停下脚步呢?我们可以继续循着这条路线往前走,借助细胞非凡的自组织能力以及对环境的响应能力,推进设计非自然的生物机械体和系统。”
http://tech.sina.com.cn/d/2014-07-07/17269480404.shtml
